Projects
Selected projects.

Design Science for Reproducible and Shareable Robot Learning
Yujian Dong, Jinqi Wei, Yang Xiao.
Proposed a novel method for reproducible and shareable robot learning by focusing on rich and intuitive representation, processing, and storage of manipulation data. This was achieved through the DeepClaw system that features a unified data storage format, easily accessible web-based software, and open-source, low-cost hardware for teleoperation and data collection.
阅读较少信息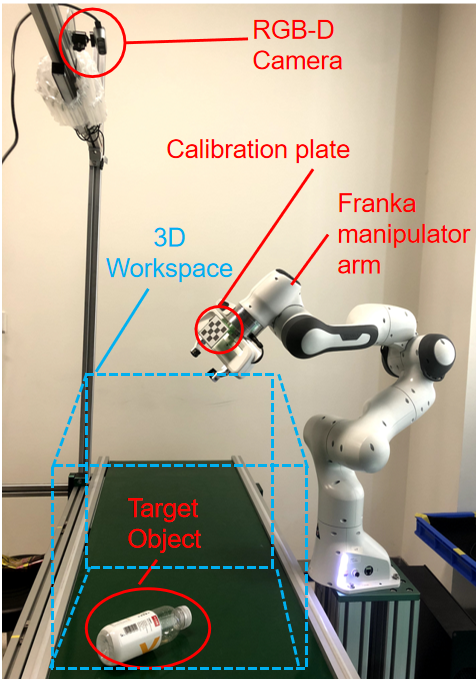

Control robot hand with any camera by recognizing hand gestures.
Demo Video
Showed on The Mobile World Congress (MWC) 2025 with Honor(a Chinese smartphone manufacturer).
Bilibili
YouTube
PaXini Tech Youtube Channel: https://www.youtube.com/@PaXini
阅读较少信息
Developed large-scale (de)palletizing application using heavy-duty KUKA robots and Mixed Integer Programs (MIPs) for industry automated warehouses, achieving a processing speed of up to 1200 boxes per hour per single robot.